| Automatic Tracking of Equatorial Mount |
My astronomical observation and photographing are limited to the moon and the planet, so the continuous observation time is 10 minutes and the movie shooting is less than 1 minute. When the magnification of telescope is low, the flow of stars is within the range of my patience, but as the magnification is increased, the flow of the stars began to feel troublesome. Therefore, I investigated whether the automatic tracking function can be added to the existing New Polaris equatorial mount. Since it is an old equatorial mount, I can see small looseness and backlash, but when I track the stars for a short time, I thought it was possible with tracking only in the left-right direction (right ascension). I succeeded in "almost" automatic tracking using a speed reducer of VFO used for amateur radio and an ultra-low speed geared motor. The reason why I said as "almost" is from simple tracking of only one-axis instead of two-axis automatic tracking, and in the present situation the star disappears from the field of vision unless the fine movement handle of the declination is turned after about 1 hour passed.
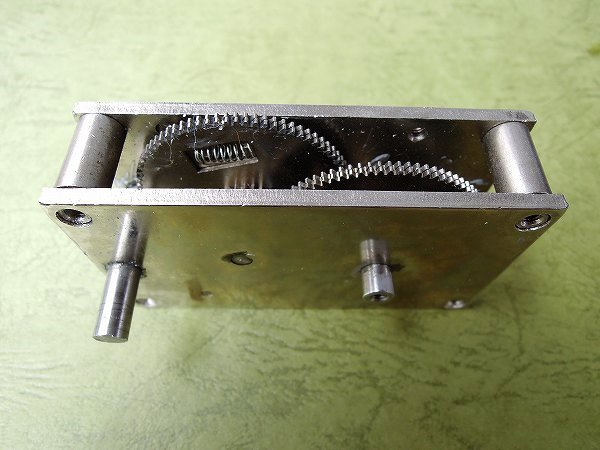 The speed reducer for VFO was removed from the vacuum tube transceiver YAESU FTDX400 and the
reduction gear ratio was measured 1:56. This VFO dial is 25 kHz with one revolution, but since
the same maker is 100 kHz in the FT101 series, the reduction ratio is four times as large and
it is convenient for the fine movement mechanism of the equatorial mount. It is an excellent
speed reducer with no backlash as well as very light rotation.
The speed reducer for VFO was removed from the vacuum tube transceiver YAESU FTDX400 and the
reduction gear ratio was measured 1:56. This VFO dial is 25 kHz with one revolution, but since
the same maker is 100 kHz in the FT101 series, the reduction ratio is four times as large and
it is convenient for the fine movement mechanism of the equatorial mount. It is an excellent
speed reducer with no backlash as well as very light rotation.
If you put the mouse over the image, it will be enlarged. (Same below)
 It is an ultra low speed geared motor of 5 rpm. I bought it with YASUKAWA Electric made in China
for mail order shipping included 1,800 yen. I will explain why I set it to 5 rpm. The graduation
crown of the equatorial right ascension is inscribed every 10 minutes and it is 24 hours in one
lap. The number of teeth of the worm wheel is estimated to be 144 since it is exactly 10 minutes
when turning the fine movement handle of the right ascension by one turn. If I represent 10 minutes
by angle, 360 / 24 / 6 = 2.5 °. Since the reduction gear ratio of the VFO reduction gearbox is
1: 56, if the VFO reduction gear rotates one turn the right ascension will rotate 2.5 / 56 =
0.04462 °. Since it is necessary to move 0.25 ° per minute in order to follow a flowing star,
the speed of the geared motor in 1 minute is 0.25 / 0.04462 = 5.6 rpm. The nearest to this number
of revolutions is the purchased motor, which is not the correct way of use, but I think that if
I raise DC 12V of the rated voltage a little, I can get a rotation speed close to 5.6 rpm.
It is an ultra low speed geared motor of 5 rpm. I bought it with YASUKAWA Electric made in China
for mail order shipping included 1,800 yen. I will explain why I set it to 5 rpm. The graduation
crown of the equatorial right ascension is inscribed every 10 minutes and it is 24 hours in one
lap. The number of teeth of the worm wheel is estimated to be 144 since it is exactly 10 minutes
when turning the fine movement handle of the right ascension by one turn. If I represent 10 minutes
by angle, 360 / 24 / 6 = 2.5 °. Since the reduction gear ratio of the VFO reduction gearbox is
1: 56, if the VFO reduction gear rotates one turn the right ascension will rotate 2.5 / 56 =
0.04462 °. Since it is necessary to move 0.25 ° per minute in order to follow a flowing star,
the speed of the geared motor in 1 minute is 0.25 / 0.04462 = 5.6 rpm. The nearest to this number
of revolutions is the purchased motor, which is not the correct way of use, but I think that if
I raise DC 12V of the rated voltage a little, I can get a rotation speed close to 5.6 rpm.
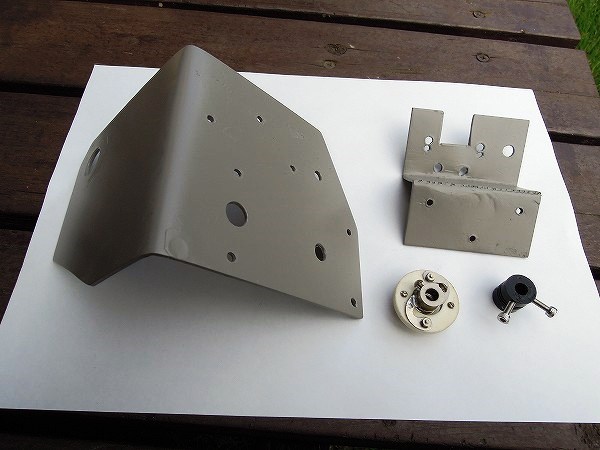 I made metal fittings to attach the speed reducer and the geared motor by coating after processing
2 mm thick aluminum plate. Because my metal plate processing technology is bad, it is not good for
the parts that turn 90 degrees. The speed reducer mounting bracket is fixed to the mounting screw
hole part for balance weight of the equatorial mount by opening a hole of 15 mm Φ. In order to
connect the shaft, use a universal joint used for amateur radio to prevent vibration as much as
possible. The right black joint is used as a clutch to separate the automatic tracking device.
I made metal fittings to attach the speed reducer and the geared motor by coating after processing
2 mm thick aluminum plate. Because my metal plate processing technology is bad, it is not good for
the parts that turn 90 degrees. The speed reducer mounting bracket is fixed to the mounting screw
hole part for balance weight of the equatorial mount by opening a hole of 15 mm Φ. In order to
connect the shaft, use a universal joint used for amateur radio to prevent vibration as much as
possible. The right black joint is used as a clutch to separate the automatic tracking device.
 The speed reducer and the geared motor were fixed to the mounting bracket and attached to the
equatorial mount. Since it is unstable with only one fixation, I installed a "stick bar" with a
6 cm long M5 screw. I hear small noise from the geared motor, but vibration does not adversely
affect the equatorial mount. If the motor is connected, a clutch is necessary because I can not
rotate the fine movement handle of right ascension by hand. There seems to be a commercially
available product, I loosen the screw of the universal joint by hand and release the speed reducer
and the motor, as I’m a poor man. Because the location is narrow and clutch operation is somewhat
troublesome, it is often to loosen the right ascension clamp and turn the telescope by hand.
The speed reducer and the geared motor were fixed to the mounting bracket and attached to the
equatorial mount. Since it is unstable with only one fixation, I installed a "stick bar" with a
6 cm long M5 screw. I hear small noise from the geared motor, but vibration does not adversely
affect the equatorial mount. If the motor is connected, a clutch is necessary because I can not
rotate the fine movement handle of right ascension by hand. There seems to be a commercially
available product, I loosen the screw of the universal joint by hand and release the speed reducer
and the motor, as I’m a poor man. Because the location is narrow and clutch operation is somewhat
troublesome, it is often to loosen the right ascension clamp and turn the telescope by hand.
 A volume to adjust the motor speed and a switch to start and stop the left and right rotation
are equipped in the controller. The DC voltage can be changed by a variable 3-terminal regulator
LM317 and a volume. The adjustment range of the motor rotation speed can be varied from -4% to +
10% of the diurnal motion speed of stars (2.5 ° / 10 minutes). Since the power supply is AC 100 V,
it is a disadvantage that an extension cord is necessary, and DC-AC inverter is necessary when
using outdoors. DC power is supplied from the controller to the motor with an RCA pin jack.
A volume to adjust the motor speed and a switch to start and stop the left and right rotation
are equipped in the controller. The DC voltage can be changed by a variable 3-terminal regulator
LM317 and a volume. The adjustment range of the motor rotation speed can be varied from -4% to +
10% of the diurnal motion speed of stars (2.5 ° / 10 minutes). Since the power supply is AC 100 V,
it is a disadvantage that an extension cord is necessary, and DC-AC inverter is necessary when
using outdoors. DC power is supplied from the controller to the motor with an RCA pin jack.
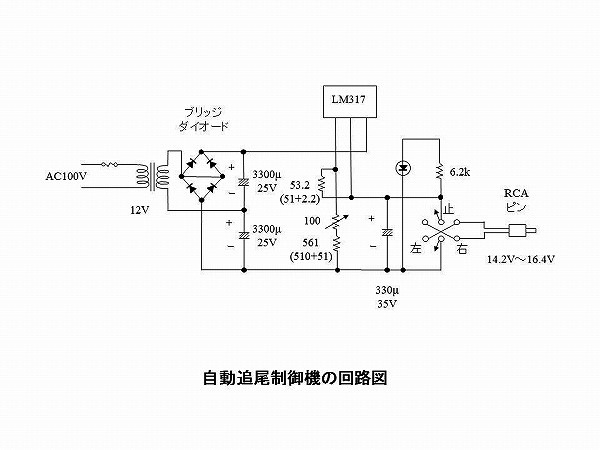 It is the circuit diagram of the controller. Because I made it with the parts I ever have,
their specifications are somewhat irregular. The output voltage during rotation of the telescope
changes from 14.2 V to 16.4 V, and the motor speed changes from 5.4 to 6.2 rpm. Since the
required rotation speed calculated from the speed reduction ratio of the reducer is 5.6 rpm,
it will need about 14.8 V DC. Although the voltage exceeding the rated voltage is applied to
the motor, it is interpreted as if it is not problematic because there is no fever or abnormal
noise at all.
It is the circuit diagram of the controller. Because I made it with the parts I ever have,
their specifications are somewhat irregular. The output voltage during rotation of the telescope
changes from 14.2 V to 16.4 V, and the motor speed changes from 5.4 to 6.2 rpm. Since the
required rotation speed calculated from the speed reduction ratio of the reducer is 5.6 rpm,
it will need about 14.8 V DC. Although the voltage exceeding the rated voltage is applied to
the motor, it is interpreted as if it is not problematic because there is no fever or abnormal
noise at all.
 I immediately measured the moon and Jupiter by setting the 1,200 mm refracting telescope on the
automatically tracked equatorial mount. The moon almost stopped because the magnification is
low (about 40), but the magnification for Jupiter is high (about 100) so it flowed little by
little to the left and went out of sight for about an hour. I usually don’t observe such a long
time, so the immediate objective was achieved. Incidentally, there are two reasons why automatic
tracking is incomplete. The first reason is when the equatorial mount is not perfectly level.
Since I just put it on the wood deck, bubbles of the level meter are at the edge and this is no
good.
So, I tried to take a perfect level by making a foothold of the tripod with 91 cm x 6 cm x 2 cm
wood and various bolts and nuts. The second reason is the possibility that the polar axis is not
completely matched. On the equatorial mount there is a cylinder to mount a polar axis telescope,
but it is impossible to equip it because it is an old model, and the North Star can not be seen
from the garden at home. So I move the alignment mark so that the telescope correctly faces the
North Star. Subsequently I rotate the tripod by 7 degrees to the right from the direction of
the magnet, and set the equatorial mount so that the elevation angle becomes 35 degrees.
I immediately measured the moon and Jupiter by setting the 1,200 mm refracting telescope on the
automatically tracked equatorial mount. The moon almost stopped because the magnification is
low (about 40), but the magnification for Jupiter is high (about 100) so it flowed little by
little to the left and went out of sight for about an hour. I usually don’t observe such a long
time, so the immediate objective was achieved. Incidentally, there are two reasons why automatic
tracking is incomplete. The first reason is when the equatorial mount is not perfectly level.
Since I just put it on the wood deck, bubbles of the level meter are at the edge and this is no
good.
So, I tried to take a perfect level by making a foothold of the tripod with 91 cm x 6 cm x 2 cm
wood and various bolts and nuts. The second reason is the possibility that the polar axis is not
completely matched. On the equatorial mount there is a cylinder to mount a polar axis telescope,
but it is impossible to equip it because it is an old model, and the North Star can not be seen
from the garden at home. So I move the alignment mark so that the telescope correctly faces the
North Star. Subsequently I rotate the tripod by 7 degrees to the right from the direction of
the magnet, and set the equatorial mount so that the elevation angle becomes 35 degrees.
 Since it turned out that automatic tracking was possible if the setting of the horizontal angle and the elevation was correct, I installed a horizontal board on which the magnet and level meter can be placed in the equatorial mount. It is a plate painted by cutting an aluminum plate of 1 mm in thickness. I think that it is possible to fit more accurately than adjusting the angle with the base fixing the tripod or the tripod itself. After that, I wanted to know to what extent the result of simple polar axis alignment was suitable for the Polar Star, so I attached a polar axis telescope. I diverted a viewfinder removed from the old telescope with 60 mm aperture, 910 mm focal length. Two M4 size screw holes were fixed with a tapping tool in the main body of the equatorial mount and I fixed it. It is not always used because I can’t see the North Star from the south of home., Also because the sky is bright, the North Star can not be seen with the naked eye. The standard polar axis telescope performs polar axis adjustment considering the seasonal position fluctuation and the diurnal movement of the Polar Star itself, but it will not be necessary so far with simple automatic tracking like this case.
Since it turned out that automatic tracking was possible if the setting of the horizontal angle and the elevation was correct, I installed a horizontal board on which the magnet and level meter can be placed in the equatorial mount. It is a plate painted by cutting an aluminum plate of 1 mm in thickness. I think that it is possible to fit more accurately than adjusting the angle with the base fixing the tripod or the tripod itself. After that, I wanted to know to what extent the result of simple polar axis alignment was suitable for the Polar Star, so I attached a polar axis telescope. I diverted a viewfinder removed from the old telescope with 60 mm aperture, 910 mm focal length. Two M4 size screw holes were fixed with a tapping tool in the main body of the equatorial mount and I fixed it. It is not always used because I can’t see the North Star from the south of home., Also because the sky is bright, the North Star can not be seen with the naked eye. The standard polar axis telescope performs polar axis adjustment considering the seasonal position fluctuation and the diurnal movement of the Polar Star itself, but it will not be necessary so far with simple automatic tracking like this case.
 Since it became possible to perform automatic tracking, the eye vision became very easy, but I
tried to photograph the planet using digital camera. Attaching the enlarged photography adapter
with the eyepiece of focal length of 15 mm to NEX-5N, I shot a movie of Saturn. After that, the
stack and wavelet processing were done with Registax 6. I think that it was pretty good in spite
of the bad seeing that thin cloud was hung.
Since it became possible to perform automatic tracking, the eye vision became very easy, but I
tried to photograph the planet using digital camera. Attaching the enlarged photography adapter
with the eyepiece of focal length of 15 mm to NEX-5N, I shot a movie of Saturn. After that, the
stack and wavelet processing were done with Registax 6. I think that it was pretty good in spite
of the bad seeing that thin cloud was hung.
 After that, as Mars approached the Earth very closely I challenged to shoot it. Although I shot
movies and made image processing with the same settings as Saturn above, I could not see the
pattern of Mars at this magnification. It seems that the magnification of about 500 times is
necessary to see the pattern.
After that, as Mars approached the Earth very closely I challenged to shoot it. Although I shot
movies and made image processing with the same settings as Saturn above, I could not see the
pattern of Mars at this magnification. It seems that the magnification of about 500 times is
necessary to see the pattern.