| 赤道儀の「ほぼ」自動追尾化 |
小生の天体観測と写真撮影は月や惑星に限られるため連続観測時間は 長くて10分、動画撮影では1分以下です。倍率が低い場合は星の流れも我慢の範囲内ですが、 倍率を上げるに従って星の流れが気になり始めました。星が望遠鏡の視界に入る最大 角度を実視界と言い、この値は望遠鏡の倍率、アイピースの口径・視野角などによって 変わりますが、小生所持の天体望遠鏡の環境では0.5度〜1.0度となります。星の流れる 速度は1分間に0.25度なので、2分〜4分で星は視界から消えてしまいます。そこで、 現有のニューポラリス 赤道儀に自動追尾機能を付加出来ないか検討しました。古い赤道儀なのでガタやバック ラッシュも見られるが、短時間の追尾なら左右方向(赤経)のみの追尾で可能と考え ました。アマチュア無線で使われるVFO用減速機と超低速ギヤードモーターを使って 「ほぼ」自動追尾化に成功しました。「ほぼ」としたのは2軸自動追尾ではなく1軸のみ の簡易な追尾であり、最初に星を導入する時は全て手動で行う必要があります。 また、本来北極星で行なう極軸合わせを磁石と居住地の緯度(北緯35度)で行ない、 追尾速度をボリュームで微調整していますが地球の自転速度とピッタリ合わせるのは至難 の業で、1時間以上追尾すると星が視界の端まで逃げて行きます。
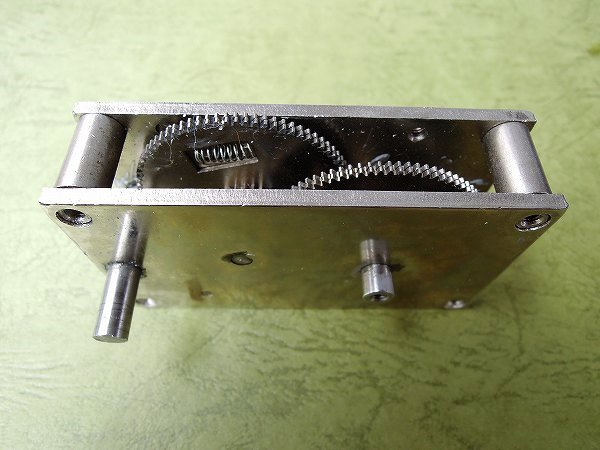 VFO用減速機はヤエスの真空管トランシーバーFTDX400から取り外したもので減速比を実測
したところ1:56でした。このVFOダイヤルは1回転で25kHzですが同じメーカーでもFT101
シリーズでは100kHzなので4倍も減速比が大きく赤道儀の微動機構には好都合です。回転が
非常に軽い上にバックラッシュもなく優れ物です。
VFO用減速機はヤエスの真空管トランシーバーFTDX400から取り外したもので減速比を実測
したところ1:56でした。このVFOダイヤルは1回転で25kHzですが同じメーカーでもFT101
シリーズでは100kHzなので4倍も減速比が大きく赤道儀の微動機構には好都合です。回転が
非常に軽い上にバックラッシュもなく優れ物です。
マウスを画像に重ねると
画像が拡大
されます。(以下同様)
 5rpmの超低速ギヤードモーターです。中国安川電機製でネット通販で送料込み1800円で
購入しました。
何故5rpmにしたかを説明します。赤道儀の赤経の目盛冠は10分毎に刻まれており1周で24
時間です。赤経の微動ハンドルを1回転させると丁度10分なのでウォームホイールの歯数は
144と推定されます。10分を角度で表すと360/24/6=2.5°です。VFO用減速機の減速比が1:
56なのでVFO用減速機を1回転させると赤経は2.5/56=0.04462°回転します。流れる星を
追尾するには1分間に0.25°動かす必要があるので、ギヤードモーターの1分間の回転数は
0.25/0.04462=5.6rpmとなります。この回転数に最も近いのが購入したモーターであり、
正しい使い方ではないですが定格電圧のDC12Vを上げれば5.6rpmに近い回転数が得ら
れると考えました。実験の結果、5.6rpmの回転数を得るにはDC14V台の電圧が必要と判明
しました。
5rpmの超低速ギヤードモーターです。中国安川電機製でネット通販で送料込み1800円で
購入しました。
何故5rpmにしたかを説明します。赤道儀の赤経の目盛冠は10分毎に刻まれており1周で24
時間です。赤経の微動ハンドルを1回転させると丁度10分なのでウォームホイールの歯数は
144と推定されます。10分を角度で表すと360/24/6=2.5°です。VFO用減速機の減速比が1:
56なのでVFO用減速機を1回転させると赤経は2.5/56=0.04462°回転します。流れる星を
追尾するには1分間に0.25°動かす必要があるので、ギヤードモーターの1分間の回転数は
0.25/0.04462=5.6rpmとなります。この回転数に最も近いのが購入したモーターであり、
正しい使い方ではないですが定格電圧のDC12Vを上げれば5.6rpmに近い回転数が得ら
れると考えました。実験の結果、5.6rpmの回転数を得るにはDC14V台の電圧が必要と判明
しました。
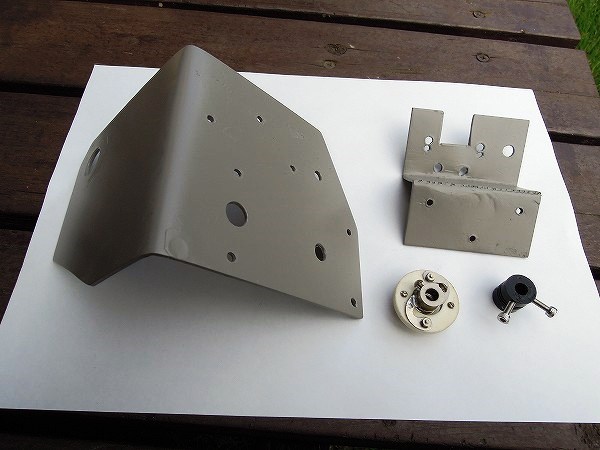 厚さ2mmのアルミ板を加工後塗装して減速機とギヤードモーターを取り付ける金具を作成
しました。金属板加工技術が下手なため90度曲がる部分の出来が余り良くありません。
減速機取付け金具は15mmΦの穴を開けて赤道儀のバランスウェート取付けネジ穴
部分に固定します。シャフトの接続にはアマチュア無線で使われる自在継手を利用して
可能な限りモーターの振動が伝わらない様にします。左側のタイト製継手はモーターと
減速器の間に、右側の黒いプラスチック製継手は減速器と赤道儀間のクラッチとして
使用しました。
厚さ2mmのアルミ板を加工後塗装して減速機とギヤードモーターを取り付ける金具を作成
しました。金属板加工技術が下手なため90度曲がる部分の出来が余り良くありません。
減速機取付け金具は15mmΦの穴を開けて赤道儀のバランスウェート取付けネジ穴
部分に固定します。シャフトの接続にはアマチュア無線で使われる自在継手を利用して
可能な限りモーターの振動が伝わらない様にします。左側のタイト製継手はモーターと
減速器の間に、右側の黒いプラスチック製継手は減速器と赤道儀間のクラッチとして
使用しました。
 減速機とギヤードモーターを取付け金具に固定し赤道儀に取り付けました。1箇所だけの
固定では不安定なので長さ6cmのM5ネジによる「つっかい棒」を設置しました。ギヤード
モーターから「ジー」という音は聞こえますが振動が赤道儀に悪影響を与える事はありません。
モーターが接続されていると赤経の微動ハンドルを手で回せないのでクラッチが必要です。
市販品があるようですがお金が勿体ないので自在継手のネジを手で緩めて減速機と赤道儀
を切り離します。場所的に狭くクラッチの操作がやや面倒なので星の導入時にはクランプ
を緩めてフリーにして手動で望遠鏡を回します。
減速機とギヤードモーターを取付け金具に固定し赤道儀に取り付けました。1箇所だけの
固定では不安定なので長さ6cmのM5ネジによる「つっかい棒」を設置しました。ギヤード
モーターから「ジー」という音は聞こえますが振動が赤道儀に悪影響を与える事はありません。
モーターが接続されていると赤経の微動ハンドルを手で回せないのでクラッチが必要です。
市販品があるようですがお金が勿体ないので自在継手のネジを手で緩めて減速機と赤道儀
を切り離します。場所的に狭くクラッチの操作がやや面倒なので星の導入時にはクランプ
を緩めてフリーにして手動で望遠鏡を回します。
 制御機の中にはモーター回転数を調整するボリュームと左右回転のスタートとストップを
開始するスイッチが装備されています。DC電圧は可変3端子レギュレータLM317とボリューム
で変化させます。モーター回転数の調整範囲は星の日周運動速度(2.5°/10分)の-4%から
+10%まで可変する事が出来ます。電源が100Vなので延長コードが必要なのが欠点で、野外
の使用時はDC-ACインバーターが必要です。制御機からモーターへの給電はRCAピンジャック
で行います。
制御機の中にはモーター回転数を調整するボリュームと左右回転のスタートとストップを
開始するスイッチが装備されています。DC電圧は可変3端子レギュレータLM317とボリューム
で変化させます。モーター回転数の調整範囲は星の日周運動速度(2.5°/10分)の-4%から
+10%まで可変する事が出来ます。電源が100Vなので延長コードが必要なのが欠点で、野外
の使用時はDC-ACインバーターが必要です。制御機からモーターへの給電はRCAピンジャック
で行います。
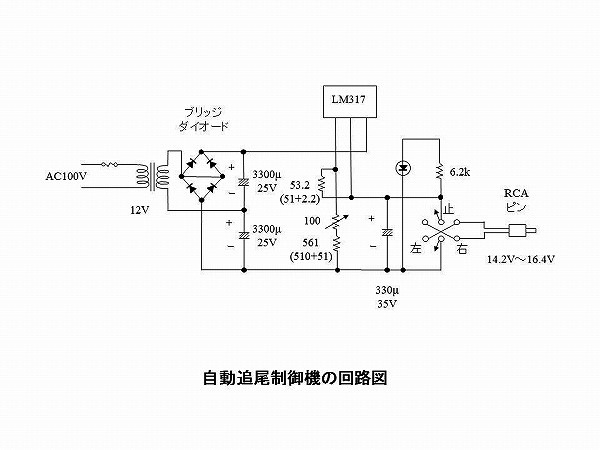 制御機の回路図です。有り合わせのパーツで作ったので数値はやや変則的です。
望遠鏡が回転中の出力電圧は14.2V〜16.4Vまで変化し、モーターの回転数は
5.4rpm〜6.2rpmまで変化します。減速機の減速比から計算した所要回転数は5.6rpm
なのでDC14.8Vくらいの電圧が必要です。定格電圧を超えた電圧をモーターに加
えていますが発熱や異音は全くないので問題ないのかなと勝手に解釈しています。
制御機の回路図です。有り合わせのパーツで作ったので数値はやや変則的です。
望遠鏡が回転中の出力電圧は14.2V〜16.4Vまで変化し、モーターの回転数は
5.4rpm〜6.2rpmまで変化します。減速機の減速比から計算した所要回転数は5.6rpm
なのでDC14.8Vくらいの電圧が必要です。定格電圧を超えた電圧をモーターに加
えていますが発熱や異音は全くないので問題ないのかなと勝手に解釈しています。
 早速、自動追尾化した赤道儀に1200mm屈折望遠鏡をセットして月と木星を観測しました。
月は倍率が低い(40倍程度)ためほぼ静止しますが、木星は倍率が高い(100倍程度)
ので少しずつ流れて行き1時間くらいで視野から居なくなります。普段はそんなに
長時間の観測はしないので当面の目的は達成出来ました。因みに、自動追尾が不完全に
なる原因が2つあります。1つ目は赤道儀の水平が完璧に取れていない時です。ウッド
デッキにただ置いただけなので水準器の泡が端っこにありこれでは駄目です。そこで、
91cmx6cmx2cmの木材とネジ類(蝶ボルト、袋ナット、鬼目ナット)で3脚の足場を自作
して完璧な水平を取る様にしました。2つ目は極軸が完全に合っていない可能性です。
赤道儀には極軸望遠鏡を取り付ける筒がありますが古い機種なので装備する事は不可能
だし北極星は自宅の庭から見えません。なので、望遠鏡が正しく北極星に向くように
合わせマークを見直し、磁石の指示方向から右方向に3脚を7°ほど動かし、仰角が35度
になるように赤道儀をセットします。
早速、自動追尾化した赤道儀に1200mm屈折望遠鏡をセットして月と木星を観測しました。
月は倍率が低い(40倍程度)ためほぼ静止しますが、木星は倍率が高い(100倍程度)
ので少しずつ流れて行き1時間くらいで視野から居なくなります。普段はそんなに
長時間の観測はしないので当面の目的は達成出来ました。因みに、自動追尾が不完全に
なる原因が2つあります。1つ目は赤道儀の水平が完璧に取れていない時です。ウッド
デッキにただ置いただけなので水準器の泡が端っこにありこれでは駄目です。そこで、
91cmx6cmx2cmの木材とネジ類(蝶ボルト、袋ナット、鬼目ナット)で3脚の足場を自作
して完璧な水平を取る様にしました。2つ目は極軸が完全に合っていない可能性です。
赤道儀には極軸望遠鏡を取り付ける筒がありますが古い機種なので装備する事は不可能
だし北極星は自宅の庭から見えません。なので、望遠鏡が正しく北極星に向くように
合わせマークを見直し、磁石の指示方向から右方向に3脚を7°ほど動かし、仰角が35度
になるように赤道儀をセットします。
 水平角と仰角の設定が正しければほぼ自動追尾出来る事が判明したので赤道儀本体に
磁石や水準器を置ける水平板を設置しました。厚さ1mmのアルミ板を切断して塗装した
物ですが三脚を固定する台や三脚自身で角度調整するより正確に合わせる事が
出来ると思います。その後、簡易的極軸合わせの結果どの程度北極星に向いているか
知りたくなり極軸望遠鏡もどきを取り付けました。口径60mm、焦点距離910mmの古い
屈折望遠鏡から取り外したファインダーを流用しました。赤道儀の本体にタッピング
工具で2本のM4ネジ穴を開けて固定しました。自宅南側から北極星は見えないので
いつも使う訳ではありませんが、田舎とは言っても都内なので空が明るく北極星も
北斗7星も肉眼ではほとんど見えないのが難点です。
本物の極軸望遠鏡は北極星自身の季節的な位置変動や日周運動も考慮して極軸合わせを
行いますが本件のような簡易自動追尾ではそこまで必要ないでしょう。
水平角と仰角の設定が正しければほぼ自動追尾出来る事が判明したので赤道儀本体に
磁石や水準器を置ける水平板を設置しました。厚さ1mmのアルミ板を切断して塗装した
物ですが三脚を固定する台や三脚自身で角度調整するより正確に合わせる事が
出来ると思います。その後、簡易的極軸合わせの結果どの程度北極星に向いているか
知りたくなり極軸望遠鏡もどきを取り付けました。口径60mm、焦点距離910mmの古い
屈折望遠鏡から取り外したファインダーを流用しました。赤道儀の本体にタッピング
工具で2本のM4ネジ穴を開けて固定しました。自宅南側から北極星は見えないので
いつも使う訳ではありませんが、田舎とは言っても都内なので空が明るく北極星も
北斗7星も肉眼ではほとんど見えないのが難点です。
本物の極軸望遠鏡は北極星自身の季節的な位置変動や日周運動も考慮して極軸合わせを
行いますが本件のような簡易自動追尾ではそこまで必要ないでしょう。
 赤道儀の自動化が完成したので何時でも簡単に天体観測が出来る様に室内から窓超しに
星を追いかける方法を検討しました。これなら3脚や鏡筒の設置・撤去の手間が不要で
天候にも左右されません。2階南側の空き部屋の窓際に3脚を固定し、極北と水平を正確
に設定しました。窓ガラスを閉めると望遠鏡の最大高度が30度しか取れないため天体
観測時は窓を開けて鏡筒の一部を外に出す事になります。どうせ晴天時しか星は見ない
ので問題ありません。これで望遠鏡の高度は0〜55度、左右の振り幅は最大60度まで
可能となりました。上下・左右の可動範囲に制限がありますが、月、木星、土星が観測
の主目的なので時間帯を選べば大きな問題はありません。
赤道儀の自動化が完成したので何時でも簡単に天体観測が出来る様に室内から窓超しに
星を追いかける方法を検討しました。これなら3脚や鏡筒の設置・撤去の手間が不要で
天候にも左右されません。2階南側の空き部屋の窓際に3脚を固定し、極北と水平を正確
に設定しました。窓ガラスを閉めると望遠鏡の最大高度が30度しか取れないため天体
観測時は窓を開けて鏡筒の一部を外に出す事になります。どうせ晴天時しか星は見ない
ので問題ありません。これで望遠鏡の高度は0〜55度、左右の振り幅は最大60度まで
可能となりました。上下・左右の可動範囲に制限がありますが、月、木星、土星が観測
の主目的なので時間帯を選べば大きな問題はありません。
 自動追尾が出来るようになったので眼視が非常に楽になりましたがデジカメの撮影は
どうなのか試して見ました。NEX-5Nで拡大撮影アダプターに焦点距離15mmのアイピース
を付けて土星を動画撮影しました。その後Registax6でスタック処理、ウェーブレット
処理しました。薄雲が掛かったあまり良いシーイングではなかった割にはまあまあの
出来だと思います。
自動追尾が出来るようになったので眼視が非常に楽になりましたがデジカメの撮影は
どうなのか試して見ました。NEX-5Nで拡大撮影アダプターに焦点距離15mmのアイピース
を付けて土星を動画撮影しました。その後Registax6でスタック処理、ウェーブレット
処理しました。薄雲が掛かったあまり良いシーイングではなかった割にはまあまあの
出来だと思います。
 その後、火星が地球に大接近するというので火星の撮影に挑戦しました。上記の土星と同じ
設定で動画撮影と画像処理をしましたが、やはりこの程度の倍率では火星の模様までは
見えませんでした。模様を見るには500倍くらいの倍率が必要ではないかと思われます。
その後、火星が地球に大接近するというので火星の撮影に挑戦しました。上記の土星と同じ
設定で動画撮影と画像処理をしましたが、やはりこの程度の倍率では火星の模様までは
見えませんでした。模様を見るには500倍くらいの倍率が必要ではないかと思われます。
番外編:赤道儀の手動追尾化
普通、赤道儀には赤経、赤緯軸に微動ハンドルがありそれらをゆっくり回せば原理的には
星を追尾出来ます。しかし、微動ハンドルを1回転させると望遠鏡は2.5度〜3度くらい
回転します。星は1分間に0.25度しか動かないので高倍率での観測時は微動ハンドルでの
追尾は非常に難しいです。そこで、微動ハンドルに減速器を追加して何とか手動追尾が
出来ないか実験して見ました。
 主鏡、赤道儀、3脚などの部品取りを目的にER-114Mなる反射望遠鏡をオークションでポチり
ました。本体と送料が同じくらいの低価格でしたが、主鏡は綺麗だったのでDS-115に移植
しました。赤道儀と3脚は軽いので少しグラグラしますが何とか使えそうです。そこで、手動
で星を追尾出来ないか検討しました。アマチュア無線で使っていたVFO用の1:56の減速器と
自在継手があったのでこれを赤道儀の赤経軸の微動装置として追加する事にしました。本来なら、
減速器に5rpm程度の低速ギヤードモーターを接続すれば自動追尾出来そうですが、こんな安物
の赤道儀には勿体ないので手動で追尾します。
主鏡、赤道儀、3脚などの部品取りを目的にER-114Mなる反射望遠鏡をオークションでポチり
ました。本体と送料が同じくらいの低価格でしたが、主鏡は綺麗だったのでDS-115に移植
しました。赤道儀と3脚は軽いので少しグラグラしますが何とか使えそうです。そこで、手動
で星を追尾出来ないか検討しました。アマチュア無線で使っていたVFO用の1:56の減速器と
自在継手があったのでこれを赤道儀の赤経軸の微動装置として追加する事にしました。本来なら、
減速器に5rpm程度の低速ギヤードモーターを接続すれば自動追尾出来そうですが、こんな安物
の赤道儀には勿体ないので手動で追尾します。
 厚さ2mmのアルミ板を加工して黒色の塗装をしました。赤道儀にタップで3mmのネジ穴を
切って減速器を固定しています。赤道儀の胴体がプラスチックなので強く固定出来ません
がそれほど重量はないので大丈夫です。赤経軸の微動ダイヤルが1回転すると目盛りが12分
だけ回転するのでウォームギヤの歯数は120枚と推定されます。12分を角度で表すと3°に
なり、減速機の減速比が1:56なので減速機を1回転させると赤経は3/56=0.05357°
回転します。流れる星を追尾するには1分間に0.25°(360/24/60=0.25)動かす必要が
あるので、1分間の回転数は0.25/0.05357=4.7rpmとなります。つまり、12.8秒で減速器
のダイヤルを1回転させれば星を追尾出来る事になります。ダイヤルを手動で定速回転
させるのは難しいので、10秒ちょっと経過したら減速器のダイヤルを1回転させれば良い
のです。小生所持の望遠鏡を高倍率で眼視した場合、星が視界の端から端まで動く時間は
約2分なので、12.8秒でのダイヤル1回転は11%に相当します。つまり、ダイヤルを1回転
させると星が視界内で1/10くらい後戻りするので追尾は難しくありません。
減速器のダイヤルはトランシーバーのメインダイヤルでノブが付いており
1回転の位置が良く分かります。なお、自在継手の大きな2本のネジはクラッチで、緩め
れば減速器が赤道儀から切り離されます。実際に月を眼視しながら10秒くらいに1回転
させたところ10分間くらいならストレスなしに追尾出来ました。
厚さ2mmのアルミ板を加工して黒色の塗装をしました。赤道儀にタップで3mmのネジ穴を
切って減速器を固定しています。赤道儀の胴体がプラスチックなので強く固定出来ません
がそれほど重量はないので大丈夫です。赤経軸の微動ダイヤルが1回転すると目盛りが12分
だけ回転するのでウォームギヤの歯数は120枚と推定されます。12分を角度で表すと3°に
なり、減速機の減速比が1:56なので減速機を1回転させると赤経は3/56=0.05357°
回転します。流れる星を追尾するには1分間に0.25°(360/24/60=0.25)動かす必要が
あるので、1分間の回転数は0.25/0.05357=4.7rpmとなります。つまり、12.8秒で減速器
のダイヤルを1回転させれば星を追尾出来る事になります。ダイヤルを手動で定速回転
させるのは難しいので、10秒ちょっと経過したら減速器のダイヤルを1回転させれば良い
のです。小生所持の望遠鏡を高倍率で眼視した場合、星が視界の端から端まで動く時間は
約2分なので、12.8秒でのダイヤル1回転は11%に相当します。つまり、ダイヤルを1回転
させると星が視界内で1/10くらい後戻りするので追尾は難しくありません。
減速器のダイヤルはトランシーバーのメインダイヤルでノブが付いており
1回転の位置が良く分かります。なお、自在継手の大きな2本のネジはクラッチで、緩め
れば減速器が赤道儀から切り離されます。実際に月を眼視しながら10秒くらいに1回転
させたところ10分間くらいならストレスなしに追尾出来ました。