| Seguimiento Automático de Montaje Acuatorial |
Mi observación astronómica y fotografía se limitan a la luna y al planeta, por lo que el tiempo de observación continua es de 10 minutos y la grabación de la película es de menos de 1 minuto. Cuando el poder de aumento de telescopio es bajo, el flujo de estrellas está dentro del rango de mi paciencia, pero a medida que aumenta el poder de aumento, el flujo de estrellas comenzó a sentirse molesto. Por lo tanto, investigué si la función de seguimiento automático se puede agregar al montaje ecuatorial New Polaris existente. Como se trata de antiguo montaje ecuatorial, puede ver la flojedad y reacción pequeña, pero si realiza el seguimiento durante un breve periodo de tiempo, pensé que era posible con el seguimiento solo en la dirección izquierda-derecha (ascensión derecha). Tuvimos éxito en el rastreo "casi" automático utilizando el reductor de velocidad VFO y el motor de engranaje de velocidad ultra baja usado para la radioafición. La razón por la que se ajustó a "casi" es el simple seguimiento de un solo eje en lugar del seguimiento automático de dos ejes, y en la situación actual, la estrella desaparece del campo de visión a menos que el control de movimiento fino de la declinación se mueva después de aproximadamente 1 hora.
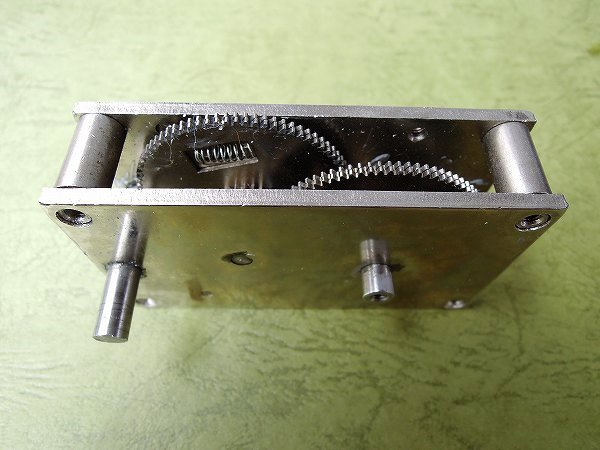 El reductor de velocidad para VFO se retiró del transceptor de tubo de vacío YAESU
FTDX400 y la relación de engranaje de reducción se midió 1:56. Este dial VFO es
de 25 kHz con una revolución, pero dado que el mismo fabricante es de 100 kHz en la serie FT101,
la relación de reducción es cuatro veces más grande y es conveniente para el
mecanismo de movimiento fino del montaje ecuatorial. Es un excelente reductor de velocidad sin juego,
así como una rotación muy ligera.
El reductor de velocidad para VFO se retiró del transceptor de tubo de vacío YAESU
FTDX400 y la relación de engranaje de reducción se midió 1:56. Este dial VFO es
de 25 kHz con una revolución, pero dado que el mismo fabricante es de 100 kHz en la serie FT101,
la relación de reducción es cuatro veces más grande y es conveniente para el
mecanismo de movimiento fino del montaje ecuatorial. Es un excelente reductor de velocidad sin juego,
así como una rotación muy ligera.
Cuando usted pone el ratón sobre la imagen, ésa va a ser aumentada. (Igual abajo)
 Es un motorreductor de velocidad ultra baja de 5 rpm. Lo compré con YASUKAWA Electric hecho
en China para envío por correo incluido 1,800 yen. Voy a explicar por qué lo puse a
5 rpm. La corona de graduación de la ascensión ecuatorial derecha se inscribe cada
10 minutos y es de 24 horas en una vuelta. El numero de dientes de la rueda helicoidal se estima
en 144, ya que son exactamente 10 minutos cuando se gira el asa de movimiento fino de la
ascensión derecha en una vuelta. Si represento 10 minutos por ángulo, 360/24/6 =
2.5 °. Dado que la relación del engranaje de reducción de la caja de engranajes
de reducción VFO es 1: 56, si el engranaje de reducción VFO gira una vuelta, la
ascensión derecha girará 2.5 / 56 = 0.04462 °. Dado que es necesario mover 0.25 °
por minuto para seguir una estrella que fluye, la velocidad del motorreductor en 1 minuto es 0.25 /
0.04462 = 5.6 rpm. El más cercano a este numero de revoluciones es el motor comprado, que no
es la forma correcta de uso, pero creo que si elevo un poco la tensión nominal de 12 V CC,
puedo obtener una velocidad de rotación cercana a 5.6 rpm.
Es un motorreductor de velocidad ultra baja de 5 rpm. Lo compré con YASUKAWA Electric hecho
en China para envío por correo incluido 1,800 yen. Voy a explicar por qué lo puse a
5 rpm. La corona de graduación de la ascensión ecuatorial derecha se inscribe cada
10 minutos y es de 24 horas en una vuelta. El numero de dientes de la rueda helicoidal se estima
en 144, ya que son exactamente 10 minutos cuando se gira el asa de movimiento fino de la
ascensión derecha en una vuelta. Si represento 10 minutos por ángulo, 360/24/6 =
2.5 °. Dado que la relación del engranaje de reducción de la caja de engranajes
de reducción VFO es 1: 56, si el engranaje de reducción VFO gira una vuelta, la
ascensión derecha girará 2.5 / 56 = 0.04462 °. Dado que es necesario mover 0.25 °
por minuto para seguir una estrella que fluye, la velocidad del motorreductor en 1 minuto es 0.25 /
0.04462 = 5.6 rpm. El más cercano a este numero de revoluciones es el motor comprado, que no
es la forma correcta de uso, pero creo que si elevo un poco la tensión nominal de 12 V CC,
puedo obtener una velocidad de rotación cercana a 5.6 rpm.
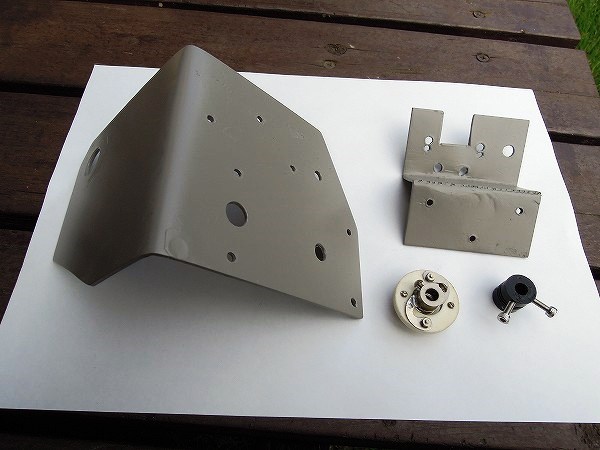 Realicé accesorios metálicos para unir el reductor de velocidad y el motorreductor
luego de procesar una placa de aluminio de 2 mm de espesor. Debido a que mi tecnología de
procesamiento de placa de metal es mala, no es buena para las piezas que giran 90 grados. El soporte
de montaje del reductor de velocidad se fija a la parte del orificio del tornillo de montaje para
equilibrar el peso del montaje ecuatorial abriendo un orificio de 15 mm. Para conectar el eje, use
una junta universal utilizada para la radioafición para evitar la vibración tanto como
sea posible. La junta negra derecha se utiliza como un embrague para separar el dispositivo de
seguimiento automático.
Realicé accesorios metálicos para unir el reductor de velocidad y el motorreductor
luego de procesar una placa de aluminio de 2 mm de espesor. Debido a que mi tecnología de
procesamiento de placa de metal es mala, no es buena para las piezas que giran 90 grados. El soporte
de montaje del reductor de velocidad se fija a la parte del orificio del tornillo de montaje para
equilibrar el peso del montaje ecuatorial abriendo un orificio de 15 mm. Para conectar el eje, use
una junta universal utilizada para la radioafición para evitar la vibración tanto como
sea posible. La junta negra derecha se utiliza como un embrague para separar el dispositivo de
seguimiento automático.
 El reductor de velocidad y el motorreductor se fijaron al soporte de montaje y se unieron al soporte
ecuatorial. Como es inestable con una sola fijación, instalé una "barra de palo" con
un tornillo M5 de 6 cm de largo. Escucho un pequeño ruido en el motorreductor, pero la
vibración no afecta negativamente al montaje ecuatorial. Si el motor está conectado,
es necesario un embrague porque no puedo girar el asa de movimiento fino de la ascensión
recta con la mano. Parece que hay un producto disponible comercialmente, aflojo el tornillo de la
junta universal a mano y suelto el reductor de velocidad y el motor, ya que soy un hombre pobre.
Debido a que la ubicación es estrecha y el funcionamiento del embrague es algo molesto, a
menudo es para aflojar la abrazadera de ascensión derecha y girar el telescopio por mano.
El reductor de velocidad y el motorreductor se fijaron al soporte de montaje y se unieron al soporte
ecuatorial. Como es inestable con una sola fijación, instalé una "barra de palo" con
un tornillo M5 de 6 cm de largo. Escucho un pequeño ruido en el motorreductor, pero la
vibración no afecta negativamente al montaje ecuatorial. Si el motor está conectado,
es necesario un embrague porque no puedo girar el asa de movimiento fino de la ascensión
recta con la mano. Parece que hay un producto disponible comercialmente, aflojo el tornillo de la
junta universal a mano y suelto el reductor de velocidad y el motor, ya que soy un hombre pobre.
Debido a que la ubicación es estrecha y el funcionamiento del embrague es algo molesto, a
menudo es para aflojar la abrazadera de ascensión derecha y girar el telescopio por mano.
 Un volumen para ajustar la velocidad del motor y un interruptor para iniciar y detener la
rotación izquierda y derecha están equipados en el controlador. El voltaje de CC se
puede cambiar mediante un regulador variable de 3 terminales LM317 y un volumen. El rango de ajuste
de la velocidad de rotación del motor se puede variar de -4% a + 10% de la velocidad de
movimiento diurno de las estrellas (2.5 ° / 10 minutos). Dado que la fuente de alimentación
es de 100 V CA, es una desventaja que se necesita un cable de extensión y que se necesita un
inversor de CC-CA cuando se utiliza en exteriores. La alimentación de CC se suministra desde
el controlador al motor con un conector de clavija RCA.
Un volumen para ajustar la velocidad del motor y un interruptor para iniciar y detener la
rotación izquierda y derecha están equipados en el controlador. El voltaje de CC se
puede cambiar mediante un regulador variable de 3 terminales LM317 y un volumen. El rango de ajuste
de la velocidad de rotación del motor se puede variar de -4% a + 10% de la velocidad de
movimiento diurno de las estrellas (2.5 ° / 10 minutos). Dado que la fuente de alimentación
es de 100 V CA, es una desventaja que se necesita un cable de extensión y que se necesita un
inversor de CC-CA cuando se utiliza en exteriores. La alimentación de CC se suministra desde
el controlador al motor con un conector de clavija RCA.
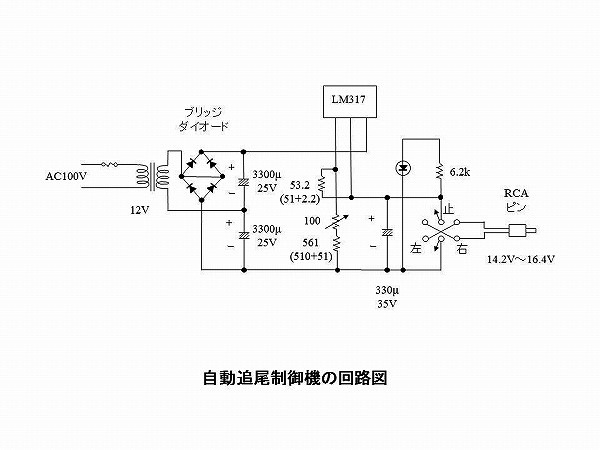 Es el esquema del circuito del controlador. Debido a que lo hice con las piezas que tengo, sus
especificaciones son algo irregulares. La tensión de salida durante la rotación del
telescopio cambia de 14.2 V a 16.4 V, y la velocidad del motor cambia de 5.4 a 6.2 rpm. Dado que
la velocidad de rotación requerida calculada a partir de la relación de reducción
de velocidad del reductor es de 5.6 rpm, necesitará aproximadamente 14.8 V CC. Aunque la
tensión que excede la tensión nominal se aplica al motor, se interpreta como si no
fuera problemática porque no hay fiebre ni ruido anormal en absoluto.
Es el esquema del circuito del controlador. Debido a que lo hice con las piezas que tengo, sus
especificaciones son algo irregulares. La tensión de salida durante la rotación del
telescopio cambia de 14.2 V a 16.4 V, y la velocidad del motor cambia de 5.4 a 6.2 rpm. Dado que
la velocidad de rotación requerida calculada a partir de la relación de reducción
de velocidad del reductor es de 5.6 rpm, necesitará aproximadamente 14.8 V CC. Aunque la
tensión que excede la tensión nominal se aplica al motor, se interpreta como si no
fuera problemática porque no hay fiebre ni ruido anormal en absoluto.
 Inmediatamente medí la luna y Jupiter colocando el telescopio refractor de 1,200 mm en el
montaje ecuatorial con seguimiento automático. La luna casi se detuvo porque el aumento
es bajo (aproximadamente 40), pero el aumento para Jupiter es alto (aproximadamente 100), por lo
que fluyó poco a poco hacia la izquierda y se perdió de vista durante aproximadamente
una hora. Por lo general no observo tanto tiempo, por lo que se logró el objetivo inmediato.
Por cierto, hay dos razones por las que el seguimiento automático es incompleto. La primera
razón es cuando el montaje ecuatorial no está perfectamente nivelado. Desde que
lo puse en la plataforma de madera, las burbujas del medidor de nivel están en el borde y
esto no es bueno. Por lo tanto, traté de alcanzar un nivel perfecto haciendo una base del
trípode con madera de 91 cm x 6 cm x 2 cm y varios tornillos y tuercas. La segunda
razón es la posibilidad de que el eje polar no esté completamente emparejado. En
la montura ecuatorial hay un cilindro para montar un telescopio de eje polar, pero es imposible
equiparlo porque es un modelo antiguo, y la Estrella del Norte no se puede ver desde el
jardín en casa.
Así que muevo la marca de alineación para que el telescopio mire correctamente a
la Estrella del Norte. Posteriormente, gire el trípode 7 grados hacia la derecha desde
la dirección de compás magnético y establezco la montura ecuatorial para que
el ángulo de elevación sea de 35 grados.
Inmediatamente medí la luna y Jupiter colocando el telescopio refractor de 1,200 mm en el
montaje ecuatorial con seguimiento automático. La luna casi se detuvo porque el aumento
es bajo (aproximadamente 40), pero el aumento para Jupiter es alto (aproximadamente 100), por lo
que fluyó poco a poco hacia la izquierda y se perdió de vista durante aproximadamente
una hora. Por lo general no observo tanto tiempo, por lo que se logró el objetivo inmediato.
Por cierto, hay dos razones por las que el seguimiento automático es incompleto. La primera
razón es cuando el montaje ecuatorial no está perfectamente nivelado. Desde que
lo puse en la plataforma de madera, las burbujas del medidor de nivel están en el borde y
esto no es bueno. Por lo tanto, traté de alcanzar un nivel perfecto haciendo una base del
trípode con madera de 91 cm x 6 cm x 2 cm y varios tornillos y tuercas. La segunda
razón es la posibilidad de que el eje polar no esté completamente emparejado. En
la montura ecuatorial hay un cilindro para montar un telescopio de eje polar, pero es imposible
equiparlo porque es un modelo antiguo, y la Estrella del Norte no se puede ver desde el
jardín en casa.
Así que muevo la marca de alineación para que el telescopio mire correctamente a
la Estrella del Norte. Posteriormente, gire el trípode 7 grados hacia la derecha desde
la dirección de compás magnético y establezco la montura ecuatorial para que
el ángulo de elevación sea de 35 grados.
 Dado que resultó que el seguimiento automático era posible si la configuración
del ángulo horizontal y la elevación eran correctas, instalé una tabla horizontal
en la que se pueden colocar el imán y el medidor de nivel en el montaje ecuatorial. Es una
placa pintada cortando una placa de aluminio de 1 mm de espesor. Creo que es posible ajustar con
mayor precisión que ajustar el ángulo con la base que fija el trípode o el
mismo trípode. Después de eso, quería saber hasta qué punto el resultado
de la simple alineación del eje polar era adecuado para la Estrella Polar, así que
conecté un telescopio de eje polar. Desvié un visor retirado del telescopio antiguo
con una apertura de 60 mm y una distancia focal de 910 mm. Se fijaron dos orificios para tornillos
de tamaño M4 con una herramienta de roscado en el cuerpo principal del montaje ecuatorial y
lo arreglé. No siempre se usa porque no puedo ver la Estrella del Norte desde el sur de mi
hogar. También porque el cielo es brillante, la Estrella del Norte no se puede ver a simple
vista. El telescopio de eje polar estándar realiza el ajuste del eje polar teniendo en cuenta
la fluctuación de la posición estacional y el movimiento diurno de la propia Estrella
Polar, pero hasta ahora no será necesario con un seguimiento automático simple como
este caso.
Dado que resultó que el seguimiento automático era posible si la configuración
del ángulo horizontal y la elevación eran correctas, instalé una tabla horizontal
en la que se pueden colocar el imán y el medidor de nivel en el montaje ecuatorial. Es una
placa pintada cortando una placa de aluminio de 1 mm de espesor. Creo que es posible ajustar con
mayor precisión que ajustar el ángulo con la base que fija el trípode o el
mismo trípode. Después de eso, quería saber hasta qué punto el resultado
de la simple alineación del eje polar era adecuado para la Estrella Polar, así que
conecté un telescopio de eje polar. Desvié un visor retirado del telescopio antiguo
con una apertura de 60 mm y una distancia focal de 910 mm. Se fijaron dos orificios para tornillos
de tamaño M4 con una herramienta de roscado en el cuerpo principal del montaje ecuatorial y
lo arreglé. No siempre se usa porque no puedo ver la Estrella del Norte desde el sur de mi
hogar. También porque el cielo es brillante, la Estrella del Norte no se puede ver a simple
vista. El telescopio de eje polar estándar realiza el ajuste del eje polar teniendo en cuenta
la fluctuación de la posición estacional y el movimiento diurno de la propia Estrella
Polar, pero hasta ahora no será necesario con un seguimiento automático simple como
este caso.
 Desde que fue posible realizar un seguimiento automático, la visión del ojo se
volvió muy fácil, pero traté de fotografiar el planeta con una cámara
digital. Al colocar el adaptador de fotografía ampliado con el ocular de distancia focal de
15 mm en NEX-5N, filmé una película de Saturno. Después de eso, el procesamiento
de pila y wavelet se realizó con Registax 6. Creo que fue bastante bueno a pesar de lo malo
que era ver que se colgaba una nube delgada.
Desde que fue posible realizar un seguimiento automático, la visión del ojo se
volvió muy fácil, pero traté de fotografiar el planeta con una cámara
digital. Al colocar el adaptador de fotografía ampliado con el ocular de distancia focal de
15 mm en NEX-5N, filmé una película de Saturno. Después de eso, el procesamiento
de pila y wavelet se realizó con Registax 6. Creo que fue bastante bueno a pesar de lo malo
que era ver que se colgaba una nube delgada.
 Después de eso, cuando Marte se acercó a Tierra muy cerca, desafié a fotografiarla.
Aunque grabé películas y realicé el procesamiento de imágenes con la misma
configuración que Saturno anterior, no pude ver el patrón de Marte con esta ampliación.
Parece que la ampliación de unas 500 veces es necesaria para ver el patrón.
Después de eso, cuando Marte se acercó a Tierra muy cerca, desafié a fotografiarla.
Aunque grabé películas y realicé el procesamiento de imágenes con la misma
configuración que Saturno anterior, no pude ver el patrón de Marte con esta ampliación.
Parece que la ampliación de unas 500 veces es necesaria para ver el patrón.